![]()
Engineering Pro Guides is your guide to passing the Mechanical & Electrical PE and FE Exams
Engineering Pro Guides provides mechanical and electrical PE and FE exam technical study guides, practice exams and much more. Contact Justin for more information.
Email: contact@engproguides.com
FE EXAM TOOLS
Dynamics, Kinematics & Vibration for the
Mechanical FE Exam
1.0 Introduction
Dynamics, Kinematics and Vibrations accounts for approximately 9 to 14 questions on the Mechanical FE exam. This section is first broken down into the two topics, (1) particles and (2) rigid bodies. Particles are a single mass subject and rigid bodies consist of a collection of particles into a solid body that does not deform. The kinematics, work, energy, impulse and momentum and kinetics equations first focus on a single mass subject. You may be familiar with problems that had a block moving down a hill or a ball being thrown. These types of problems covered particles. Problems on rigid bodies are those that contain mechanical components like cams where one part of the body moves relative to another part of the body.
Kinematics covers the movement, speed and acceleration of particles and rigid bodies. This includes radial movement and movement due to gravity. Kinetics builds upon kinematics by including force and energy, which also transitions into the work-energy topic. Lastly, this section covers friction and impulse-momentum.
2.0 KINEMATICS OF PARTICLES
Kinematics type problems will be centered on finding one of these three variables, (1) the distance traveled by an object, (2) the velocity of an object or (3) the acceleration of an object at any given time or location. If a problem asks for one of these three variables and forces are not involved, then most likely the solution will be found using the equations presented in the kinematics topic.
Within the topic of kinematics you may encounter problems with either linear motion or angular motion. Linear motion is the movement of an object within the x-y-z plane in either a straight line or a curve. Curve type movement is typical of projectiles and straight line movement is typical of vehicles, sliding blocks, pistons and springs. Angular motion is the circular movement of an object about an axis, within the x-y-z plane. This type of movement is typical of gears, pumps, fans and any other equipment that rotates about an axis.
2.1 LINEAR MOTION
2.1.1 Linear Displacement
The first variable in linear motion is displacement.

On the FE exam, you can use the following equations to help you solve any kinematics problems for the distance (xf) when there is constant acceleration.

2.1.2 Linear Velocity
The instantaneous velocity at a time (t) is the derivative of the position.

The average velocity of an object can be found by dividing the change in position over a specific time interval.
On the FE exam, you can use the following equations to help you solve any kinematics problems for the specific scenario of uniform acceleration.

2.1.3 Linear Acceleration
The instantaneous acceleration at a time (t) is the derivative of the velocity or the second derivative of the position.

The average acceleration of an object can be found by dividing the change in velocity over a specific time interval.

If the object is increasing in speed (accelerating), then acceleration will be positive and if the object is decreasing in speed (decelerating), then acceleration will be negative. If the object is moving at constant velocity then acceleration will be equal to 0.

2.1.4 Projectiles
When completing these types of problems on the FE exam, you need to remember that motion can occur in the X, Y and Z plane and equations can be found for each plane. For example, projectiles can move in the X and Y planes at the same time but acceleration due to gravity only occurs in the Y plane. The previously discussed equations can be re-written for the X and Y planes based on the assumption that there is no x-acceleration and the only y-acceleration is downward (negative) due to gravity.

2.2 ANGULAR MOTION
Similar to linear motion, angular motion can be characterized by its equations governing displacement, velocity and acceleration.
2.2.1 Angular Displacement
The first variable is angular displacement or the amount of rotation that has occurred as a function of time.


On the FE exam, you can use the following equations to help you solve any kinematics problems for the angle in radians (θ f) when there is constant angular acceleration.

2.2.2 Angular Velocity
The instantaneous angular velocity at a time (t) is the derivative of the position.

The average angular velocity of an object can be found by dividing the change in radians over a specific time interval.

On the FE exam, you can use the following equations to help you solve any kinematics problems for the angular velocity with uniform acceleration.

2.2.3 Angular Acceleration
The instantaneous angular acceleration at a time (t) is the derivative of the angular velocity or the second derivative of the position.

The average angular acceleration of an object can be found by dividing the change in angular velocity over a specific time interval.

If the object is increasing in speed (accelerating), then acceleration will be positive and if the object is decreasing in speed (decelerating), then acceleration will be negative. If the object is moving at constant velocity then acceleration will be equal to 0.

3.0 Kinetic Friction
Friction is the force that resists the movement of surfaces that slide upon one another. Most problems on the FE exam will assume that the surfaces are frictionless. If a friction factor or frictional force is not provided, then it is safe to assume that the surfaces are frictionless. However, there should be a few problems that will incorporate friction into the problem. For these few problems it is important to understand two main concepts.
First, the object in question will have a normal force that is perpendicular to the contacted surface. Secondly, there will be a force that is tangent to the surface that is opposite to the movement of the object. If the object is not moving, then the force is opposite the direction that the object is approaching movement. For example, if the object is on a slope, then the impeding motion is downward and the frictional force will be opposite this motion.
There are two types of friction, static friction and kinetic friction. When an object is at rest, there will be no motion until the force to cause movement is greater than the maximum force due to static friction. Once the movement force is greater than this value, then the object will move. Once the object is moving, the friction force that opposes movement will now be equal to the equation for kinetic friction, shown below. Static friction was covered in more detail in Section 7.0 Statics.

There are three types of problems involving on the FE exam. These problems center on a sliding block of mass “m” under the following three scenarios: (1) A sliding block on a horizontal surface, (2) a sliding block on an angled surface and (3) a sliding block on an angled surface with an external force.
3.1 HORIZONTAL MOVING BLOCK
In this scenario a horizontal force is applied in the opposite direction of the frictional force. The horizontal component is equal to the entire magnitude of the external horizontal force. However, a variation on this problem involves changing the angle of the push/pull force. When the angle is changed you must break up the vector into the x and y directions and create balanced equations for both the x and y forces.
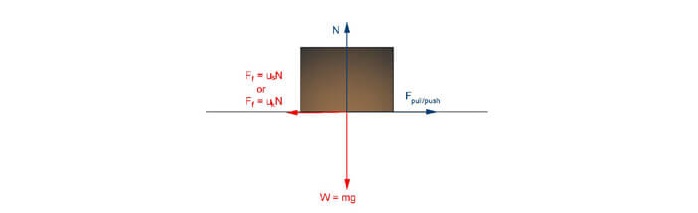
Figure 1: A horizontal moving block is subject to frictional forces in the opposite direction of movement.
The following table is a summary of the equations that balance both the x and y direction forces. Although this example is very simple, you should remember to distinguish between the x and y directions for the more complex FE problems.

3.2 ANGLED SLIDING BLOCK WITHOUT EXTERNAL FORCE
This section is discussed in the technical study guide.
3.3 ANGLED SLIDING BLOCK WITH EXTERNAL FORCE
This section is discussed in the technical study guide.
3.4 BELTS AND PULLEYS FRICTION
This section is discussed in the technical study guide.
SEE TECHNICAL STUDY GUIDE FOR MORE
4.0 Newton's Second Law for Particles
Newton’s second law for particles states that the motion of particles or objects for which net forces are not balanced will be a function of the particles’ or objects’ mass and the net force acting upon the particles or objects. This law leads you to the study of Kinetics.

Kinetics is the study of motion. As shown above, if there is a non-zero resultant force acting upon a particle, then the particle will change its velocity. If there is a zero resultant force acting upon a particle, then the particle will remain at its same speed.
4.1 LINEAR MOMENTUM
This change in resultant force acting upon a particle is equal to the particle’s change in momentum. Momentum has the same vector direction as the velocity of the particle and it is equal to the particle’s mass times its velocity.

The units for mass for USCS is in slugs or lb-s2/ft. It is important that when you use the momentum and force equations in USCS that you watch the units. The units of mass you use in thermodynamics and fluids will be in pound-mass, while the units of mass you use in statics and dynamics will be in slugs. The units of force will be in lb in statics and dynamics.

For example, if you are given a particle mass of 200 lb and wanted to know the force due to gravity, then you would have to first convert the mass to slugs.

Now you can use the F=ma equation to find the force due to gravity.

If you always show the units, when completing these problems or any other similar problems, then there should be no confusion.
The conservation of momentum equations state that the sum of the momentum of two objects will equal a constant, if there is no change in resultant force. The equation below shows two objects, mass – m1 and m2 and these objects are moving at speeds v1 and v2. After a certain event, the mass and velocity of the two objects may change, but the sum of the momentums of both objects will equal the previous momentum.

If there is a non-zero resultant force, then the momentum will change. This momentum change will be equal to the resultant force.

The next equation shows that if there are two objects in the question, then the change in velocity multiplied by the mass of each object will equal the resultant force.

4.2 ANGULAR MOMENTUM
This section is discussed in the technical study guide.
4.3 MASS MOMENT OF INERTIA
This section is discussed in the technical study guide.
5.0 Work-Energy of Particles
Another way to solve kinetic type problems on the FE exam is to use the conservation of energy and conservation of momentum equations. The basic concept is that energy is conserved and you can use these conservation equations to solve for unknowns. You should use Work-Energy equations for when the length of time is not a factor and you should use Impulse Momentum equations when length of time that a force acts is a factor. This may be a little confusing at first, but in Impulse Momentum equations the length of time that a force acts is important, where as in the Work-Energy equations it is not the time at which a force acts but the comparison between the forces, work, energy at one point in time compared to the forces, work and energy at another point in time.
5.1 CONSERVATION OF ENERGY
The conservation of energy equations state that the sum of all energy will equal a constant. Thus at time t =1 and at time t = 2, the sum of the total energy at both times will equal each other. On the FE exam, the most common types of energy will be kinetic energy and potential energy. The equations are shown below.
Kinetic Energy is the energy of a particle due to motion. Potential energy is the energy of a particle due to its relative height. There is also another potential energy for springs. When a spring is compressed there is potential energy due to the deformation of the spring from its normal length or free length.
5.1.1 SI Equations
The SI version is shown below.

5.1.2 USCS Equations
This section is discussed in the technical study guide.
5.2 WORK VS. ENERGY
This section is discussed in the technical study guide.
5.3 VECTOR EQUATIONS (X AND Y-DIRECTIONS)
This section is discussed in the technical study guide.
5.4 ROTATIONAL MOTION CONSERVATION OF ENERGY
This section is discussed in the technical study guide.
6.0 Impulse-Momentum of Particles
Impulse-momentum equations can be used to solve problems where you are given force, mass, velocity and time. You should use these equations especially when there is an impact or when force is only applied for a certain period of time and then removed. Impulse is defined as the integral of force over a specific time period.

The units for impulse are shown below.

If an object is subject to an impulse, then that impulse will change the momentum. An example of this effect is shown in the equation below. In this example, a particle has a mass and velocity as shown, then the particle is subject to an impulse with no change in the mass. This results in a change in velocity of the particle.

7.0 Kinematics of Rigid Bodies
NCEES makes the distinction between rigid bodies and particles on its NCEES FE Mechanical outline, however the governing equations and concepts are the same for Kinematics. A rigid body is defined as a solid body that does not deform. This means that any force or energy acting upon a rigid body will be translated to motion as opposed to changing the internal energy or shape of the body.
The equations for kinematics of simple rigid bodies will be the same as those presented in Kinematics of Particles for linear and angular motion. The major difference will occur when you are doing problems on kinematics of mechanisms which is a specific and more complex type of rigid body. This is discussed in the next topics.
8.0 Kinematics of Mechanisms
A mechanism is a system of mechanical parts like members, frames, etc. A force acts upon the mechanism which causes motion throughout the mechanism. A simple example of a mechanism is a scissors. Force is applied to one side of a scissors, which causes motion on the sharp side of the scissors, which is used to cut materials.
The equations for kinematics of mechanisms will be the same equations as those for kinematics of particles and rigid bodies. However, mechanisms can become even more complex as you will need to determine the relationships between links, cams, levers, etc. These types of questions typically require a software program to complete.
The main topic that you should understand for Kinematics of Mechanisms is the two-bar mechanism, because this is the simplest mechanisms that can test your understanding of kinematics without requiring a software program. You may need to know the four-bar mechanism, but the four-bar requires multiple equations with multiple unknowns which will be difficult to test in a few minutes.
8.1 TWO BAR MECHANISM (SLIDER-CRANK)
This section is discussed in the technical study guide.
9.0 Newton's Second Law for Rigid Bodies
Similar to the topic Newton’s Second Law for Particles, this topic focuses on the F = ma equation and also Kinetics but for rigid bodies. The same equations are used, so please refer to Newton’s Second Law for Particles.
10.0 Work-Energy Rigid Bodies
This section is discussed in the technical study guide.
10.1 CONSERVATION OF ENERGY AND MOMENTUM
This section is discussed in the technical study guide.
11.0 Impulse-Momentum of Rigid Bodies
This section is discussed in the technical study guide.
11.1 INELASTIC VS. ELASTIC COLLISIONS
This section is discussed in the technical study guide.
11.2 COEFFICIENT OF RESTITUTION
This section is discussed in the technical study guide.
12.0 Free and Forced Vibrations
This section is discussed in the technical study guide.
12.1 SINUSOIDAL FUNCTIONS
This section is discussed in the technical study guide.
12.2 SPRINGS
This section is discussed in the technical study guide.
12.3 NATURAL FREQUENCY
This section is discussed in the technical study guide.
13.0 Practice Problems
13.1 PRACTICE PROBLEM 1 - FRICTION
A beam is leaning against a frictionless wall. The dimensions are shown on the below figure. The beam weighs 30 lbs and the surface at point B is assumed to have a static friction value of 0.4. What is the force, F, required to keep the beam from moving?
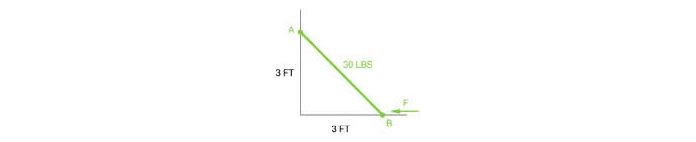
The answer is most nearly,
(a) 3 LBS
(b) 14 LBS
(c) 30 LBS
(d) 33 LBS
13.2 PRACTICE PROBLEM 2 - FRICTION
A braking system applies a force of 30 N (F) to a rotating part that has a moment of 100 N-m. The rotating part is pinned at O and is allowed to rotate about O. The coefficient of kinetic friction is 0.4. What is the reaction force in the X-direction at point O? The radius of the rotating part is R = 250 mm.

The answer is most nearly,
(a) 100 N
(b) 200 N
(c) 300 N
(d) 400 N